������������ ������ ��������������� ���������� ������������� ��� ����������� ���������� �������� ������
�������������� ���������� �������������.
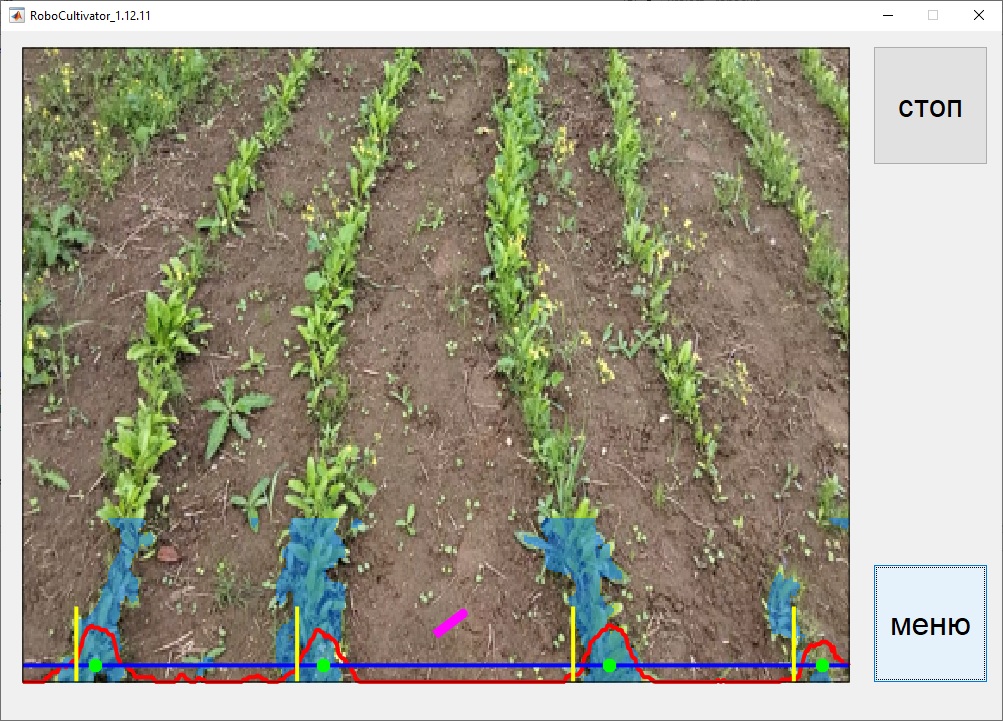
��������� ������������� ���������� ������������� ��������� ����� ��������� ��������, ������ ����������� ����������� ����� ������������ ��� �������� ��������� �������������������� �������.
��������� ���� � �������� ���������
�������� ��������������:
- ����������� ���������� ����� ������ ���������� 20 ��.
- ������� ������ ��������������� ������ �� 4 �.
- �������� �������� ������������ �� 8 ��/�.
- �������� ������������ �������� ���� �������� �� �2,0 �� �2,3 ��.
������������� �������:
- �� � ����������� ����������� �� ��������.
- ���� ���������� (�����������).
- ����������� (�������� ��������������� �� �������������� ��������).
��� ��������������:
E-mail: robotics@newman.bas-net.by
������� �����������: +375 17 373-41-80